Why Is the Velocity Accuracy of a UDR GNSS Receiver Sometimes Lower Than That of a Non-UDR GNSS Receiver?
Quote from GPSWebShop Official on April 22, 2026, 9:50 amWhen comparing GNSS products, it is important to understand that published velocity accuracy figures do not always reflect the same design priorities. In some cases, a UDR GNSS receiver (e.g. GR-8018) may show lower nominal velocity accuracy than a non-UDR GNSS receiver (e.g. GR-U01 or GR-M02). However, this does not necessarily mean it performs worse in real-world applications.
The difference mainly comes from the system architecture and the intended application of each type of receiver.
1. Different Design Priorities
A UDR GNSS receiver is designed for applications that require not only GNSS positioning, but also continuous navigation output in environments where satellite signals may be blocked or degraded. These environments may include tunnels, parking structures, urban canyons, elevated roads, or other areas with intermittent GNSS reception.
To achieve this, a UDR receiver combines GNSS measurements with data from an onboard IMU, such as an accelerometer and gyroscope. The navigation solution is therefore generated through sensor fusion, rather than relying on GNSS measurements alone.
Because of this design, the reported velocity accuracy of a UDR GNSS receiver may be slightly lower than that of a non-UDR GNSS receiver, especially during dynamic transitions such as:
entering or exiting tunnels
temporary signal blockage and recovery
switching between GNSS-dominant and inertial-assisted states
This is a normal engineering trade-off. A UDR receiver is optimized for continuity, stability, and robustness, rather than for the best possible raw GNSS velocity figure under ideal conditions.
2. Why Non-UDR GNSS Receivers May Show Better Velocity Accuracy
A non-UDR GNSS receiver is typically designed with a stronger focus on raw GNSS measurement performance, especially in environments with clear sky visibility and stable satellite reception.
Since it does not need to balance GNSS performance with dead reckoning behavior and inertial sensor fusion, a non-UDR receiver can often provide better nominal velocity accuracy in open-sky conditions.
This is especially true for dual-band non-UDR receivers, which can reduce ionospheric error and improve measurement robustness. Under good signal conditions, such receivers usually deliver more accurate velocity output than a UDR-oriented solution.
3. Lower Nominal Accuracy Does Not Mean Lower Practical Value
The lower published velocity accuracy of a UDR GNSS receiver should not be interpreted as meaning it is less capable overall. It simply reflects a different design objective.
In general:
Non-UDR GNSS receiver: optimized for higher raw GNSS velocity accuracy in open-sky conditions
UDR GNSS receiver: optimized for output continuity, motion stability, and performance in signal-challenged environments
As a result, the most suitable receiver depends on the actual use case.
For example:
If the application is mainly operated in open-sky environments and the priority is the best possible raw GNSS velocity accuracy, a non-UDR GNSS receiver may be the better choice.
If the application involves frequent signal blockage, temporary GNSS outages, or requires more continuous output during movement, a UDR GNSS receiver may provide better real-world performance.
4. High Update Rate Is Often More Important in Dynamic Applications
Many UDR GNSS receivers are also designed to support high update rates, such as 50 Hz output, which makes them especially suitable for dynamic motion analysis, vehicle navigation, and other applications requiring high-frequency data output.
In these cases, the goal is not simply to maximize the best-case velocity accuracy number in a static specification table. Instead, the goal is to maintain a stable, continuous, and usable navigation solution in real operating conditions.
5. Accuracy Figures May Also Be Based on Different Statistical Definitions
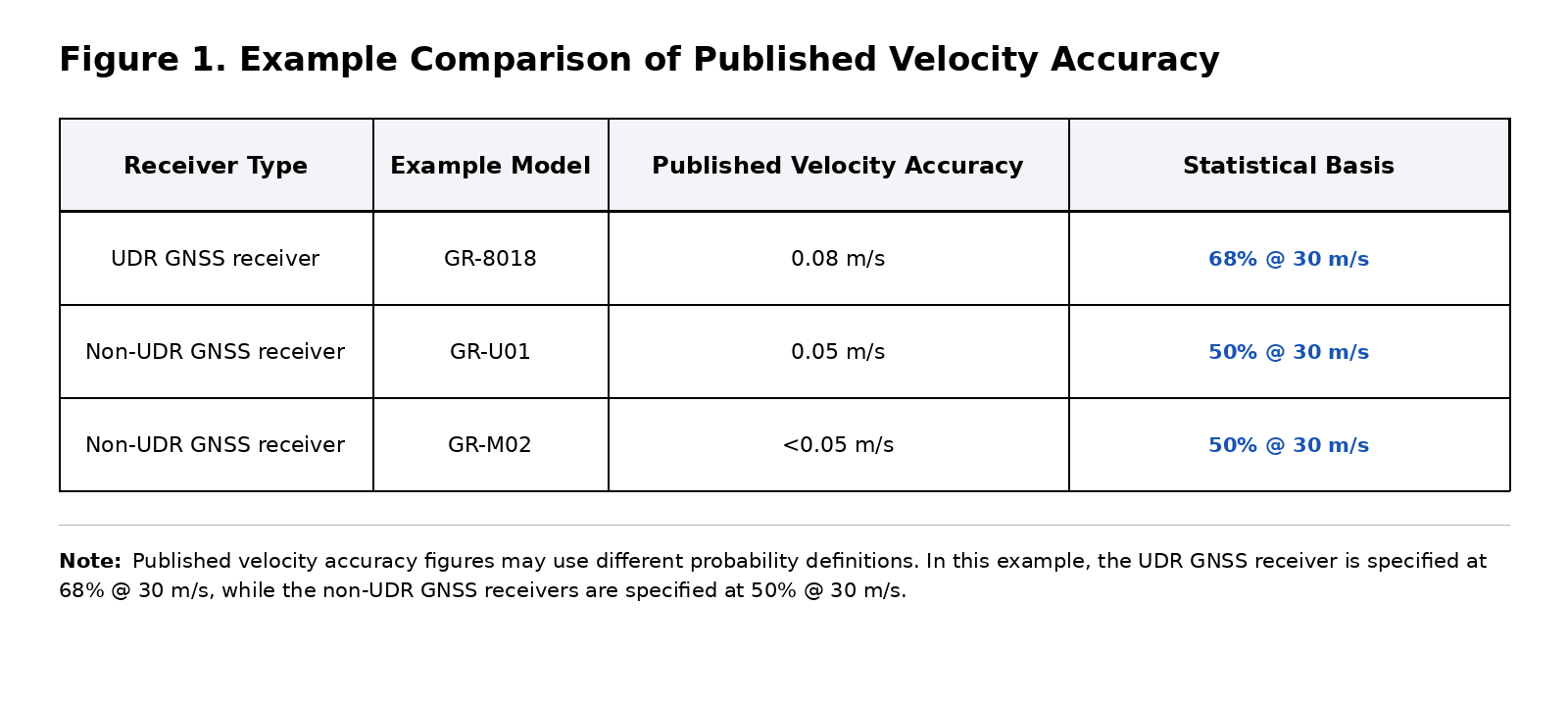
Another important factor is that published velocity accuracy figures are not always based on the same statistical confidence level.
For example, one receiver may specify velocity accuracy at 68% probability, while another may use 50% probability. If the probability basis is different, the specification values are not directly equivalent and should not be compared as if they were measured under the same standard.
Therefore, when reviewing a comparison table, it is important to consider not only the value itself, but also the statistical basis behind it.
6. Which Type of Receiver Should You Choose?
The best choice depends on the operating environment and application requirements.
Choose a non-UDR GNSS receiver (e.g. GR-U01 or GR-M02) if the application is mainly in open-sky conditions and the priority is maximum raw GNSS velocity accuracy
Choose a UDR GNSS receiver (e.g. GR-8018) if the application requires continuous positioning, better tolerance to signal interruption, or high-rate output for dynamic movement
In short, a UDR GNSS receiver is not designed only to produce the lowest velocity accuracy number on paper. It is designed to provide a more robust and continuous navigation solution in real-world environments where GNSS conditions are not always ideal.
When comparing GNSS products, it is important to understand that published velocity accuracy figures do not always reflect the same design priorities. In some cases, a UDR GNSS receiver (e.g. GR-8018) may show lower nominal velocity accuracy than a non-UDR GNSS receiver (e.g. GR-U01 or GR-M02). However, this does not necessarily mean it performs worse in real-world applications.
The difference mainly comes from the system architecture and the intended application of each type of receiver.
1. Different Design Priorities
A UDR GNSS receiver is designed for applications that require not only GNSS positioning, but also continuous navigation output in environments where satellite signals may be blocked or degraded. These environments may include tunnels, parking structures, urban canyons, elevated roads, or other areas with intermittent GNSS reception.
To achieve this, a UDR receiver combines GNSS measurements with data from an onboard IMU, such as an accelerometer and gyroscope. The navigation solution is therefore generated through sensor fusion, rather than relying on GNSS measurements alone.
Because of this design, the reported velocity accuracy of a UDR GNSS receiver may be slightly lower than that of a non-UDR GNSS receiver, especially during dynamic transitions such as:
-
entering or exiting tunnels
-
temporary signal blockage and recovery
-
switching between GNSS-dominant and inertial-assisted states
This is a normal engineering trade-off. A UDR receiver is optimized for continuity, stability, and robustness, rather than for the best possible raw GNSS velocity figure under ideal conditions.
2. Why Non-UDR GNSS Receivers May Show Better Velocity Accuracy
A non-UDR GNSS receiver is typically designed with a stronger focus on raw GNSS measurement performance, especially in environments with clear sky visibility and stable satellite reception.
Since it does not need to balance GNSS performance with dead reckoning behavior and inertial sensor fusion, a non-UDR receiver can often provide better nominal velocity accuracy in open-sky conditions.
This is especially true for dual-band non-UDR receivers, which can reduce ionospheric error and improve measurement robustness. Under good signal conditions, such receivers usually deliver more accurate velocity output than a UDR-oriented solution.
3. Lower Nominal Accuracy Does Not Mean Lower Practical Value
The lower published velocity accuracy of a UDR GNSS receiver should not be interpreted as meaning it is less capable overall. It simply reflects a different design objective.
In general:
-
Non-UDR GNSS receiver: optimized for higher raw GNSS velocity accuracy in open-sky conditions
-
UDR GNSS receiver: optimized for output continuity, motion stability, and performance in signal-challenged environments
As a result, the most suitable receiver depends on the actual use case.
For example:
-
If the application is mainly operated in open-sky environments and the priority is the best possible raw GNSS velocity accuracy, a non-UDR GNSS receiver may be the better choice.
-
If the application involves frequent signal blockage, temporary GNSS outages, or requires more continuous output during movement, a UDR GNSS receiver may provide better real-world performance.
4. High Update Rate Is Often More Important in Dynamic Applications
Many UDR GNSS receivers are also designed to support high update rates, such as 50 Hz output, which makes them especially suitable for dynamic motion analysis, vehicle navigation, and other applications requiring high-frequency data output.
In these cases, the goal is not simply to maximize the best-case velocity accuracy number in a static specification table. Instead, the goal is to maintain a stable, continuous, and usable navigation solution in real operating conditions.
5. Accuracy Figures May Also Be Based on Different Statistical Definitions
Another important factor is that published velocity accuracy figures are not always based on the same statistical confidence level.
For example, one receiver may specify velocity accuracy at 68% probability, while another may use 50% probability. If the probability basis is different, the specification values are not directly equivalent and should not be compared as if they were measured under the same standard.
Therefore, when reviewing a comparison table, it is important to consider not only the value itself, but also the statistical basis behind it.
6. Which Type of Receiver Should You Choose?
The best choice depends on the operating environment and application requirements.
-
Choose a non-UDR GNSS receiver (e.g. GR-U01 or GR-M02) if the application is mainly in open-sky conditions and the priority is maximum raw GNSS velocity accuracy
-
Choose a UDR GNSS receiver (e.g. GR-8018) if the application requires continuous positioning, better tolerance to signal interruption, or high-rate output for dynamic movement
In short, a UDR GNSS receiver is not designed only to produce the lowest velocity accuracy number on paper. It is designed to provide a more robust and continuous navigation solution in real-world environments where GNSS conditions are not always ideal.