RTK Moving Base Concept:
RTK technology introduces the concepts of a base and a rover. The base station continuously sends correction data (usually using the RTCM protocol) to one or more rovers via a communication link. This enables the rover to compute its position relative to the base with high accuracy.
The vector, or relative position, between the base and the rover is called the baseline.
In standard RTK mode, the base remains static in a known position. In moving base RTK mode, both the base and rover receivers can move.
How does a Heading RTK GNSS Works?
RTK heading technology is based on the RTK moving base concept. The moving base concept refers to a setup where one of the two GNSS receivers/antennas acts as the base station and the other as the rover, both located on the same moving platform, such as an autonomous vehicle or a drone. This method allows for high-precision direction (heading) measurements.
A heading RTK GNSS receiver usually comes equipped with dual RTK engines and dual antennas: one primary and one secondary. The primary RTK engine and antenna function as an RTK base station, while the secondary RTK engine and antenna act as an RTK rover. This setup represents a typical RTK moving base configuration, where both the RTK base and RTK rover are in motion.
In this setup, high-precision relative heading and positioning can be achieved without a fixed RTK base station. The relative positioning accuracy between the moving base and the rover relies on phase difference measurements between them, rather than on error correction data from a fixed RTK base station.
How is the heading determined?
- Antenna Arrangement: Two antennas (Antenna A and Antenna B) are installed on the same carrier with a known baseline length between them.
- Signal Reception: Both antennas simultaneously receive signals from multiple GNSS satellites.
- Phase Difference Measurement: The dual-engine RTK receiver measures the phase difference of signals received by the two antennas to calculate the relative position change between them.
- Heading Calculation: Using the known baseline length and the measured phase difference, the receiver computes the heading angle of the carrier.
Two Typical Usage Scenarios for heading RTK GNSS Receiver
Scenario 1: High-Accuracy Heading
In this scenario, a CORS service is not required. If only heading information is needed without high-precision absolute positioning, a fixed RTK base station or CORS service is unnecessary. As illustrated in the diagram below, the rear antenna acts as the moving base antenna, and the front antenna serves as the rover antenna. The heading is determined from the moving base antenna to the rover antenna.

Scenario 2: High-Accuracy Heading and Positioning
In this scenario, a CORS service is required. When both heading and absolute position data are needed, the rear antenna serves as the moving base antenna, and the front antenna functions as the rover antenna. The heading is determined from the moving base antenna to the rover antenna.
When the moving base RTK engine receives CORS correction data, it achieves absolute RTK-level accuracy. The rover engine, receiving correction data from the moving base, also determines the absolute position and heading with RTK-level accuracy.
Without a CORS service, the heading RTK receiver can only achieve non-RTK position accuracy and RTK heading accuracy.

Where to by a Heading RTK GNSS Receiver
These days, you can find RTK heading GNSS receivers at affordable prices. For example, the GeoAstra RTU609BT heading RTK GNSS receiver is priced below US$800. Its directional accuracy is up to 0.2° per 1m baseline. Please refer to the product page for more details.
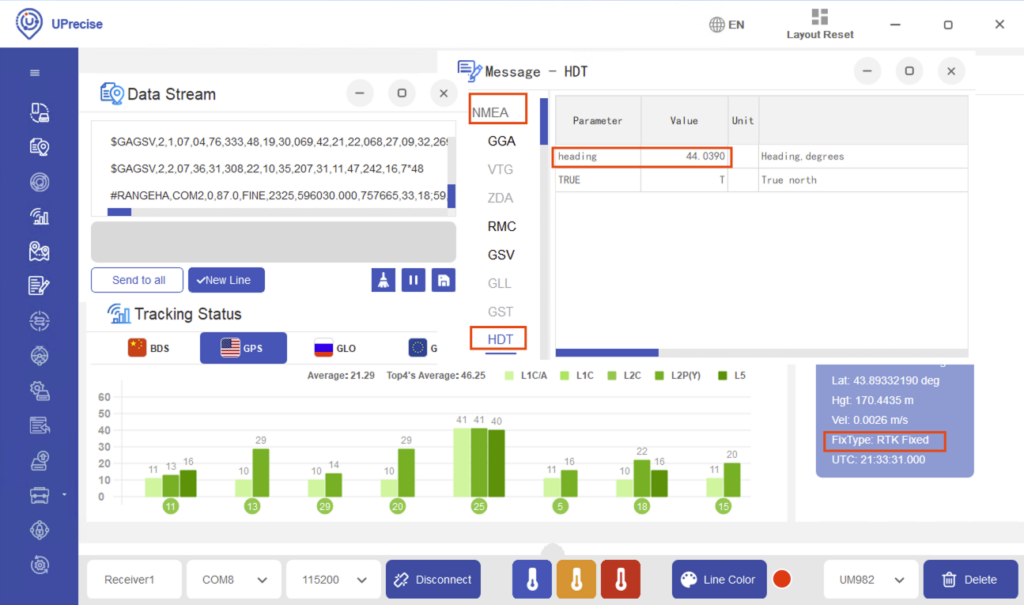
The GeoAstra RTU609BT is a dual-engine RTK GNSS receiver with two antennas. Below is a screenshot of the standard NMEA output from the HDT sentence, which streams the heading data. You may also notice the FixType is RTK Fixed, indicating RTK-level heading accuracy.
The RTU609BT not only provides heading data, it also provides 2-dimensional direction data. For example, mounting two antennas on the X-axis of the plane gives both heading and roll information.
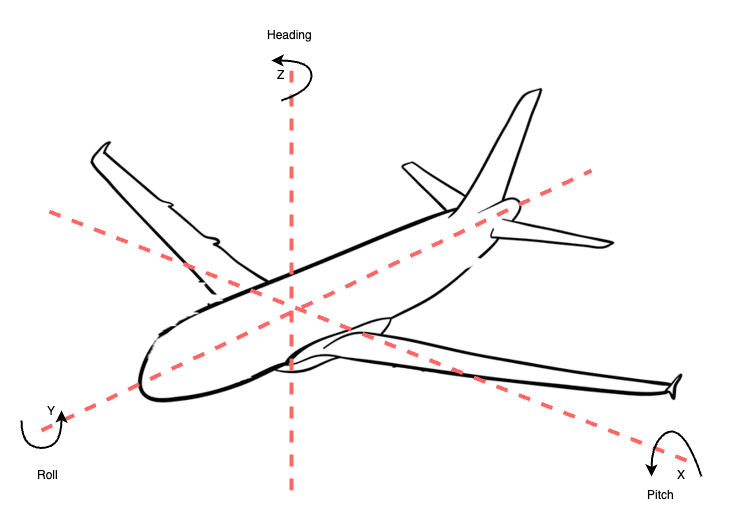
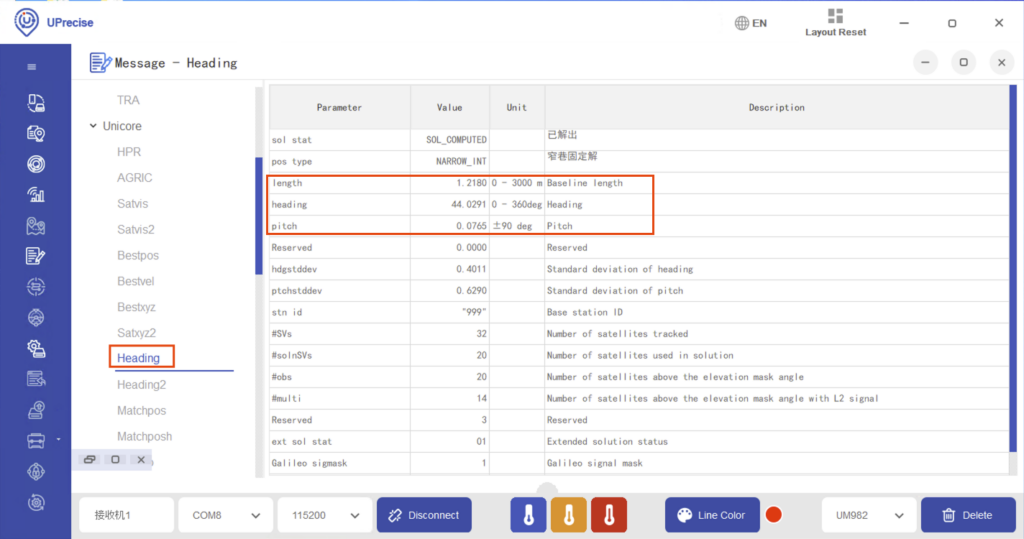
Below is a screenshot of the “Heading” sentence, which streams the heading and pitch data (the pitch parameter actually outputs roll data because the two antennas are mounted on the X-axis of the plane).
I hope the above example helps you better understand how a heading RTK GNSS works in the real world.
GeoAstra RTU609BT can be purchased from:
https://gpswebshop.com (US & WorldWide)
https://canadagps.ca (Canada)