How the GR-9028 acquired Base Station location?
Quote from GPSWebShop Official on August 11, 2023, 11:36 pmGR-9028 utilizes the “Survey-in” method to acquire the base station’s position. This process can be completed in a few minutes. Survey-in involves estimating the receiver’s position by calculating a weighted mean of all valid 3D position solutions. When configuring the survey-in method, two major parameters are required.
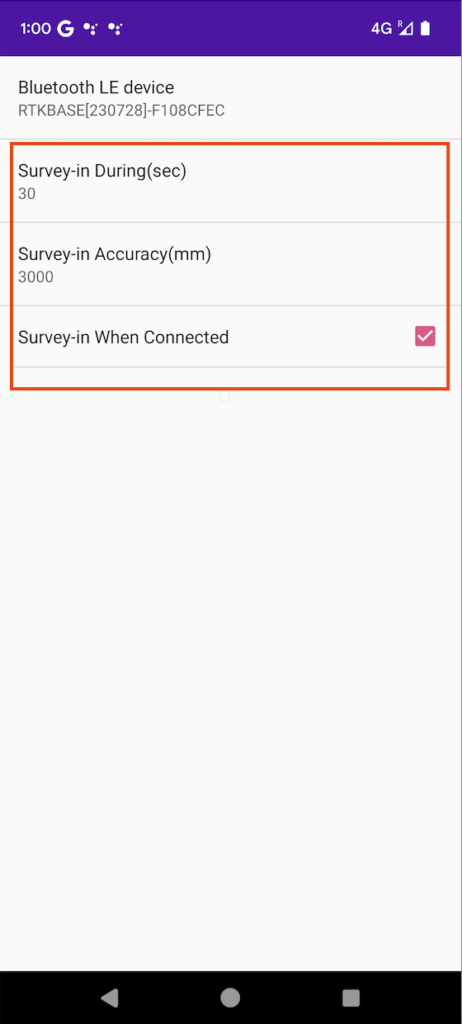
- The (Survey-in During(Sec) / (Minimum Observation Time) parameter sets the minimum duration for observations, regardless of the number of fixes used to estimate the position. The value can vary depending on the desired level of accuracy, ranging from one day for high-precision requirements to just half a minute for rough position determination. In practical terms, a value of 30 seconds (or 0.5 minutes) is good to use for a quick setup.
- The (Survey-in Accuracy(mm)) / (Required Position Accuracy) parameter determines the desired absolute position accuracy for the rover. In practical terms, a value of 3 meters is commonly used.
The “Survey-in” method typically requires an unobstructed open sky and strong GNSS reception.
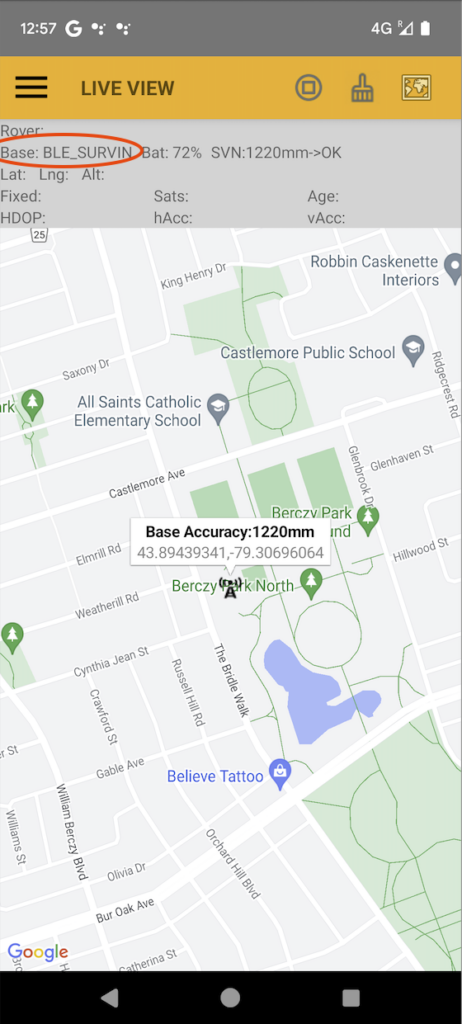
Survey-in concludes when both requirements are successfully met. At this point, the receiver transitions into time mode and starts generating a base position message labeled “RTCM3 1005”. You should now observe that the “Base” field changed to “BLE_BASE”.
GR-9028 utilizes the “Survey-in” method to acquire the base station’s position. This process can be completed in a few minutes. Survey-in involves estimating the receiver’s position by calculating a weighted mean of all valid 3D position solutions. When configuring the survey-in method, two major parameters are required.
- The (Survey-in During(Sec) / (Minimum Observation Time) parameter sets the minimum duration for observations, regardless of the number of fixes used to estimate the position. The value can vary depending on the desired level of accuracy, ranging from one day for high-precision requirements to just half a minute for rough position determination. In practical terms, a value of 30 seconds (or 0.5 minutes) is good to use for a quick setup.
- The (Survey-in Accuracy(mm)) / (Required Position Accuracy) parameter determines the desired absolute position accuracy for the rover. In practical terms, a value of 3 meters is commonly used.
The “Survey-in” method typically requires an unobstructed open sky and strong GNSS reception.
Survey-in concludes when both requirements are successfully met. At this point, the receiver transitions into time mode and starts generating a base position message labeled “RTCM3 1005”. You should now observe that the “Base” field changed to “BLE_BASE”.
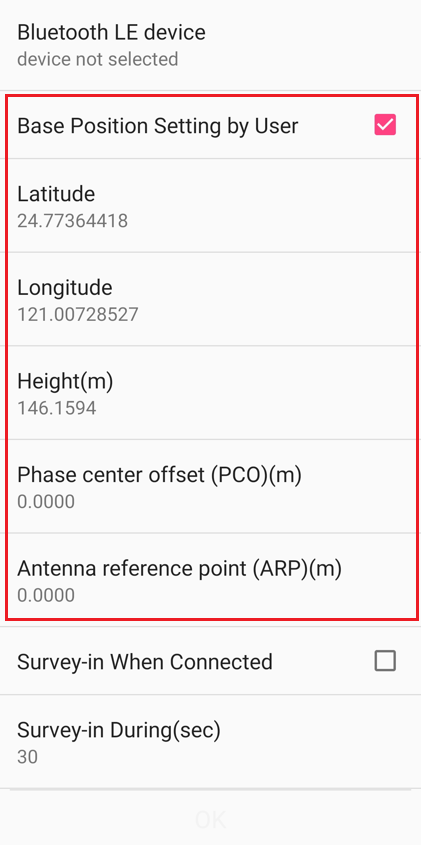
Quote from GPSWebShop Official on June 15, 2024, 9:24 pmThe BLERTK app has recently added a new feature. In addition to using "Survey-in" to acquire the base location, you can now input the known base position manually. Please see the screenshot below.
For more details on the "fixed position" input, please refer to this article:
https://community.gpswebshop.com/2024/01/24/navisys-gr-9028-base-settings-explained/
The BLERTK app has recently added a new feature. In addition to using "Survey-in" to acquire the base location, you can now input the known base position manually. Please see the screenshot below.
For more details on the "fixed position" input, please refer to this article:
Explanation of Fixed Position, Survey-in, PCO, and ARP in Navisys GR-9028 (or GR-903 Base) Settings.